First Order System Of Linear Differential Equations - Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. A first order system of differential equations that can be written in the form. In this section we will look at some of the basics of systems of differential equations. We show how to convert a system of.
A first order system of differential equations that can be written in the form. We show how to convert a system of. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. In this section we will look at some of the basics of systems of differential equations.
Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. We show how to convert a system of. A first order system of differential equations that can be written in the form. In this section we will look at some of the basics of systems of differential equations. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =.

SOLUTION First order linear differential equations Studypool
A first order system of differential equations that can be written in the form. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. In this section we will look at some of the basics of systems of differential equations. We show how to convert a system of. Outline 1 introduction 2 reviewonmatrices.

SOLUTION First order linear differential equations Studypool
Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. We show how to convert a system of. In this section we will look at some of the basics of systems of differential equations. A first order system of differential equations that can be.

FirstOrder Linear Differential Equations Video & Lesson Transcript
In this section we will look at some of the basics of systems of differential equations. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. We show how to convert a system of. A first order system of differential equations that can be written in the form. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t).

SOLUTION First order linear differential equations Studypool
In this section we will look at some of the basics of systems of differential equations. We show how to convert a system of. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. A first order system of differential equations that can be written in the form. Outline 1 introduction 2 reviewonmatrices.

System Of First Order Ordinary Differential Equations
Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. In this section we will look at some of the basics of systems of differential equations. We show how to convert a system of. A first order system of differential equations that can be written in the form. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t).

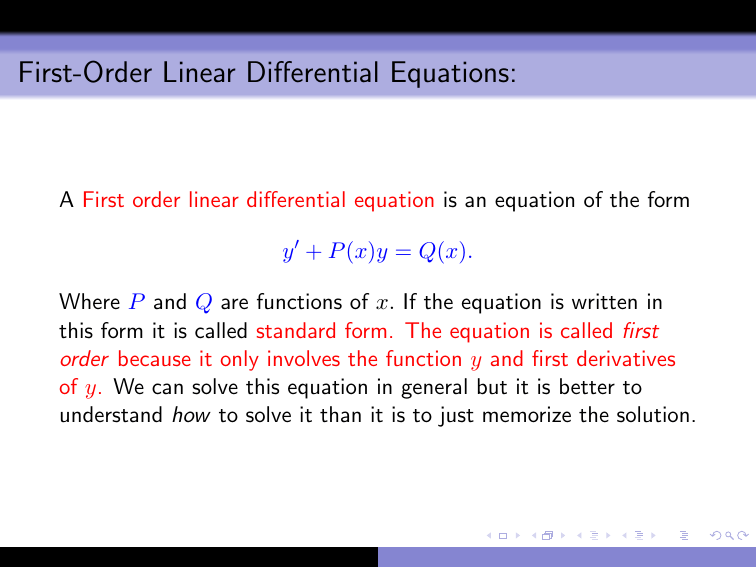
PPT First Order Linear Differential Equations PowerPoint Presentation
A first order system of differential equations that can be written in the form. We show how to convert a system of. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. In this section we will look at some of the basics of.
FirstOrder Linear Differential Equations
Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. We show how to convert a system of. A first order system of differential equations that can be written in the form. In this section we will look at some of the basics of systems of differential equations. Outline 1 introduction 2 reviewonmatrices.
Linear FirstOrder Differential Equations
Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. We show how to convert a system of. A first order system of differential equations that can be written in the form. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. In this section we will look at some of the basics of.

Solutions to Types of First Order Linear Differential Equations
We show how to convert a system of. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. A first order system of differential equations that can be written in the form. In this section we will look at some of the basics of.
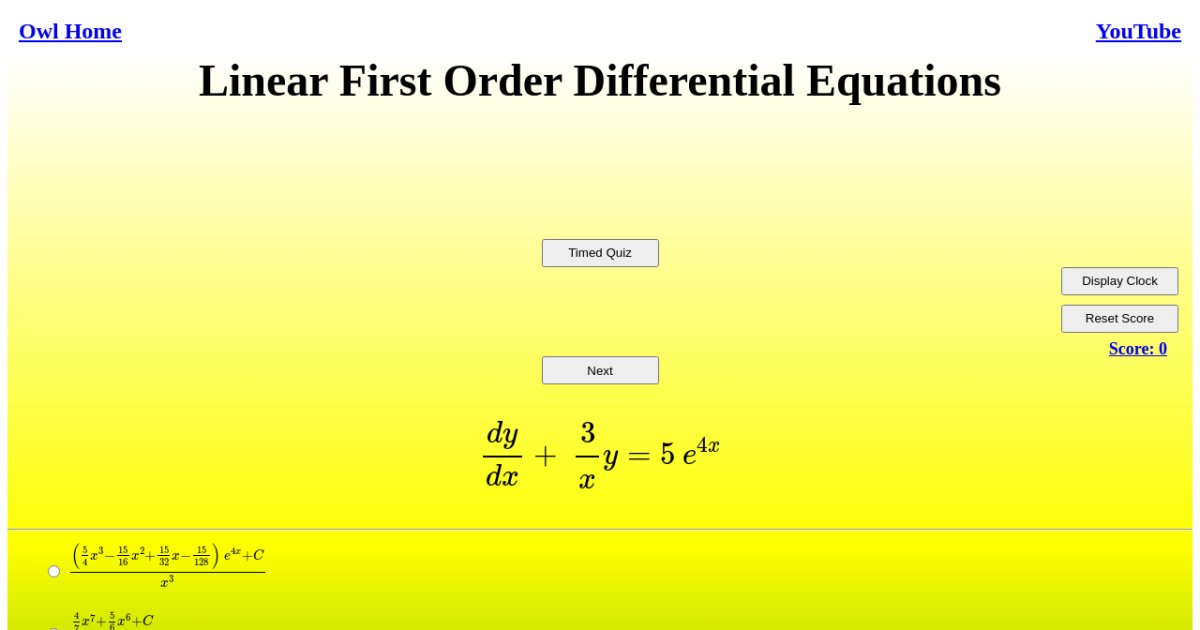
Linear First Order Differential Equations
We show how to convert a system of. A first order system of differential equations that can be written in the form. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. In this section we will look at some of the basics of systems of differential equations. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t).
A First Order System Of Differential Equations That Can Be Written In The Form.
In this section we will look at some of the basics of systems of differential equations. Y ′ 1 = a11(t)y1 + a12(t)y2 + ⋯ + a1n(t)yn + f1(t) y ′ 2 =. Outline 1 introduction 2 reviewonmatrices 3 eigenvalues,eigenvectors 4 homogeneouslinearsystemswithconstantcoefficients. We show how to convert a system of.